
Page 32 - Hafen Hamburg | Broschüre | Port of Hamburg Magazine 3.2021
P. 32
■ DIGITALE WELT
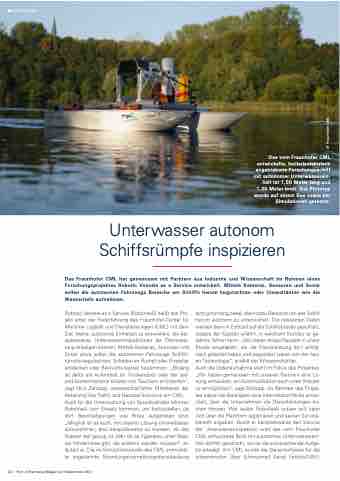
Das vom Fraunhofer CML entwickelte, batterieelektrisch angetriebene Forschungsschiff mit autonomer Unterwasserein- heit ist 1,50 Meter lang und 1,20 Meter breit. Der Prototyp wurde auf einem See sowie per Simulationen getestet.
32 | Port of Hamburg Magazine | September 2021
Unterwasser autonom Schiffsrümpfe inspizieren
Das Fraunhofer CML hat gemeinsam mit Partnern aus Industrie und Wissenschaft im Rahmen eines Forschungsprojektes Robotic Vessels as a Service entwickelt. Mittels Kameras, Sensoren und Sonar sollen die autonomen Fahrzeuge Bereiche um Schiffe herum begutachten oder Umweltdaten wie die Wassertiefe aufnehmen.
Robotic Vessels as a Service (RoboVaaS) heißt das Pro- jekt unter der Federführung des Fraunhofer-Center für Maritime Logistik und Dienstleistungen (CML) mit dem Ziel, kleine, autonome Einheiten zu entwickeln, die bei- spielsweise Unterwasserinspektionen als Dienstleis- tung erledigen können. Mittels Kameras, Sensoren und Sonar etwa sollen die autonomen Fahrzeuge Schiffs- rümpfe begutachten, Schäden an Rumpf oder Propeller entdecken oder Bewuchs besser bestimmen. „Bislang ist dafür ein Aufenthalt im Trockendock oder der zeit- und kostenintensive Einsatz von Tauchern erforderlich“, sagt Nico Zantopp, wissenschaftlicher Mitarbeiter der Abteilung Sea Traffic and Nautical Solutions am CML. Auch für die Untersuchung von Spundwänden könnten RoboVaaS zum Einsatz kommen, um festzustellen, ob dort Beschädigungen wie Risse aufgetreten sind. „Möglich ist es auch, mit unserer Lösung Umweltdaten aufzunehmen, also beispielsweise zu messen, ob das Wasser tief genug ist oder ob es irgendwo unter Was- ser Hindernisse gibt, die entfernt werden müssen“, er- läutert er. Die im Simulationsstudio des CML entwickel- te sogenannte Strandungsvermeidungsdienstleistung
(anti grounding case), dient dazu Bereiche um das Schiff herum autonom zu untersuchen. Die relevanten Daten werden dann in Echtzeit auf die Schiffsbrücke geschickt, sodass der Kapitän erfährt, in welchem Korridor er ge- fahrlos fahren kann. „Wir haben einige Nautiker in unser Studio eingeladen, die die Dienstleistung dort erfolg- reich getestet haben und begeistert waren von der neu- en Technologie“, erzählt der Wissenschaftler.
Auch die Datenaufnahme steht im Fokus des Projektes. „Wir haben gemeinsam mit unseren Partnern eine Lö- sung entwickelt, um Kommunikation auch unter Wasser zu ermöglichen“, sagt Zantopp. Im Rahmen des Projek- tes haben die Beteiligten eine Internetoberfläche entwi- ckelt, über die Unternehmen die Dienstleistungen bu- chen können. Wer später RoboVaaS nutzen will, kann sich über die Plattform registrieren und seinen Service- bereich angeben. Bucht er beispielsweise den Service der Unterwasserinspektion wird das vom Fraunhofer CML entwickelte Boot mit autonomer Unterwasserein- heit dorthin geschickt, wo es die entsprechende Aufga- be erledigt. Am CML wurde die Steuersoftware für die unbemannten Über (Unmanned Aerial Vehicle/UAV)-
© Fraunhofer CML
